發(fā)布時間:2020-04-07 閱讀次數(shù):1949次
晶振的短期頻率穩(wěn)定度由噪聲引起導(dǎo)致的頻率不穩(wěn)定。其中,電噪聲是根本原因。電噪聲包括熱噪聲,散彈噪聲,以及閃變噪聲。導(dǎo)體的無規(guī)律熱運動帶來熱噪聲。從頻域來看,對應(yīng)的參數(shù)是相位噪聲(Phase Noise);從時域來看,對應(yīng)的參數(shù)是抖動(Jitter)。時間和頻域之間的關(guān)系互為倒數(shù)Time=1/Frequency。抖動Jitter抖動是信號偏離理想位置的程度,表示的是時域特征。單位一般用pS,fS表示。抖動分為確定性和隨機(jī)性抖動。確定性抖動是可識別的干擾信號造成的,這種抖動的幅度有限。總抖動的構(gòu)成如下:在時域中,噪聲是非周期的函數(shù)。而傅里葉分析可以把此函數(shù)分解成多個正弦周期的函數(shù),如下。相位噪聲Phase Noise若沒有相位噪聲,振蕩器的整個功率都集中在f0(10MHz為例),功率頻譜就是一條以f0為中心的直線 ,且信號為純正的正弦波。但是任何信號都有不穩(wěn)定性 ,從而產(chǎn)生了邊帶sideband。相位噪聲通常定義為一個振蕩器在某一偏移頻率fm處1Hz寬帶內(nèi)的單邊信號功率和信號的總功率比值,單位是dBc/Hz.通常表示為dBc/Hz@fm。相位噪聲的形成因素主要三方面:· A區(qū)主要是晶體Q值來決定。高頻晶體有很高的近載波相位噪聲(Close-in Phase Noise), 因為他們有低的Q值和更寬的邊帶。· B區(qū)主要是晶體外圍電路(包括IC)來決定。· C區(qū)主要是信號輸出(白噪聲)來決定。抖動對系統(tǒng)穩(wěn)定度的影響低噪聲KOAN晶振在精密電子儀器,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
抖動Jitter
抖動是信號偏離理想位置的程度,表示的是時域特征。單位一般用pS,fS表示。抖動分為確定性和隨機(jī)性抖動。確定性抖動是可識別的干擾信號造成的,這種抖動的幅度有限。總抖動的構(gòu)成如下:在時域中,噪聲是非周期的函數(shù)。而傅里葉分析可以把此函數(shù)分解成多個正弦周期的函數(shù),如下。相位噪聲Phase Noise若沒有相位噪聲,振蕩器的整個功率都集中在f0(10MHz為例),功率頻譜就是一條以f0為中心的直線 ,且信號為純正的正弦波。但是任何信號都有不穩(wěn)定性 ,從而產(chǎn)生了邊帶sideband。相位噪聲通常定義為一個振蕩器在某一偏移頻率fm處1Hz寬帶內(nèi)的單邊信號功率和信號的總功率比值,單位是dBc/Hz.通常表示為dBc/Hz@fm。相位噪聲的形成因素主要三方面:· A區(qū)主要是晶體Q值來決定。高頻晶體有很高的近載波相位噪聲(Close-in Phase Noise), 因為他們有低的Q值和更寬的邊帶。· B區(qū)主要是晶體外圍電路(包括IC)來決定。· C區(qū)主要是信號輸出(白噪聲)來決定。抖動對系統(tǒng)穩(wěn)定度的影響低噪聲KOAN晶振在精密電子儀器,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
在時域中,噪聲是非周期的函數(shù)。而傅里葉分析可以把此函數(shù)分解成多個正弦周期的函數(shù),如下。相位噪聲Phase Noise若沒有相位噪聲,振蕩器的整個功率都集中在f0(10MHz為例),功率頻譜就是一條以f0為中心的直線 ,且信號為純正的正弦波。但是任何信號都有不穩(wěn)定性 ,從而產(chǎn)生了邊帶sideband。相位噪聲通常定義為一個振蕩器在某一偏移頻率fm處1Hz寬帶內(nèi)的單邊信號功率和信號的總功率比值,單位是dBc/Hz.通常表示為dBc/Hz@fm。相位噪聲的形成因素主要三方面:· A區(qū)主要是晶體Q值來決定。高頻晶體有很高的近載波相位噪聲(Close-in Phase Noise), 因為他們有低的Q值和更寬的邊帶。· B區(qū)主要是晶體外圍電路(包括IC)來決定。· C區(qū)主要是信號輸出(白噪聲)來決定。抖動對系統(tǒng)穩(wěn)定度的影響低噪聲KOAN晶振在精密電子儀器,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
相位噪聲Phase Noise
若沒有相位噪聲,振蕩器的整個功率都集中在f0(10MHz為例),功率頻譜就是一條以f0為中心的直線 ,且信號為純正的正弦波。但是任何信號都有不穩(wěn)定性 ,從而產(chǎn)生了邊帶sideband。相位噪聲通常定義為一個振蕩器在某一偏移頻率fm處1Hz寬帶內(nèi)的單邊信號功率和信號的總功率比值,單位是dBc/Hz.通常表示為dBc/Hz@fm。相位噪聲的形成因素主要三方面:· A區(qū)主要是晶體Q值來決定。高頻晶體有很高的近載波相位噪聲(Close-in Phase Noise), 因為他們有低的Q值和更寬的邊帶。· B區(qū)主要是晶體外圍電路(包括IC)來決定。· C區(qū)主要是信號輸出(白噪聲)來決定。抖動對系統(tǒng)穩(wěn)定度的影響低噪聲KOAN晶振在精密電子儀器,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
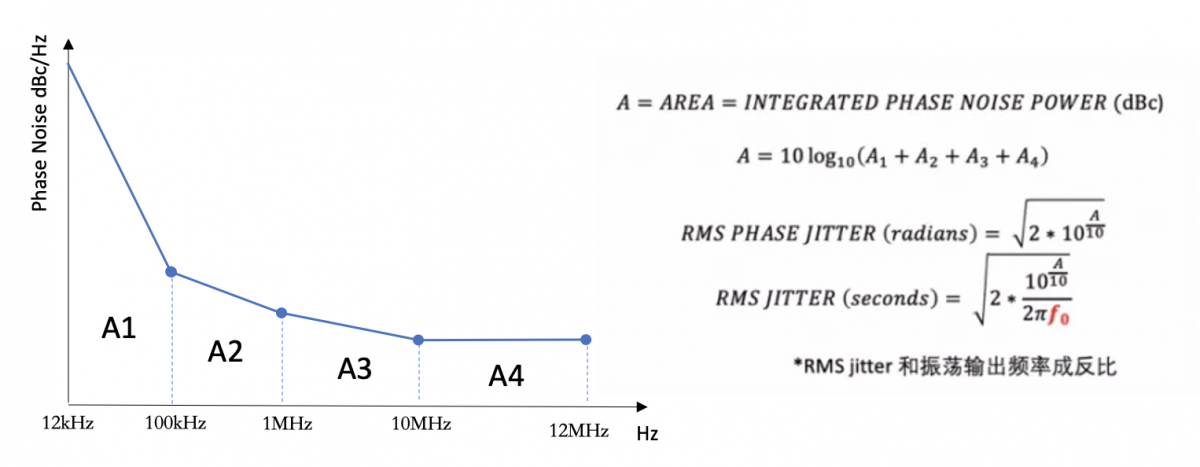
相位噪聲的形成因素主要三方面:
· A區(qū)主要是晶體Q值來決定。高頻晶體有很高的近載波相位噪聲(Close-in Phase Noise), 因為他們有低的Q值和更寬的邊帶。· B區(qū)主要是晶體外圍電路(包括IC)來決定。· C區(qū)主要是信號輸出(白噪聲)來決定。抖動對系統(tǒng)穩(wěn)定度的影響低噪聲KOAN晶振在精密電子儀器,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
· B區(qū)主要是晶體外圍電路(包括IC)來決定。· C區(qū)主要是信號輸出(白噪聲)來決定。抖動對系統(tǒng)穩(wěn)定度的影響低噪聲KOAN晶振在精密電子儀器,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
· C區(qū)主要是信號輸出(白噪聲)來決定。
抖動對系統(tǒng)穩(wěn)定度的影響
低噪聲KOAN晶振在精密電子儀器,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
假設(shè)有一個微處理器系統(tǒng),其中處理器的時鐘上升前需要1ns的數(shù)據(jù)設(shè)置。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
假設(shè)另一個微處理器系統(tǒng)的數(shù)據(jù)要求保持時間為2ns,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)相位噪聲轉(zhuǎn)化為RMS JitterRMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
相位噪聲轉(zhuǎn)化為RMS Jitter
RMS Jitter是對相位噪聲圖的弧面的面積做積分的計算。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。KOAN推出低相噪抖動系列晶振第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
KOAN推出低相噪抖動系列晶振
第一步: 選中‘相噪抖動’特種晶振類別。第二步: 進(jìn)行篩選第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21 KOAN精益求晶 產(chǎn)品中心 - 晶體諧振器(KX) - 時鐘振蕩器(KS/KD/KJ/KM) - 壓控振蕩器(KV) - 溫補(bǔ)振蕩器(KT) - 恒溫振蕩器(KO) - 晶體濾波器(M.C.F) 技術(shù)支持 - 晶振百科 - 技術(shù)社區(qū) - 實驗測試 關(guān)于我們 - 公司介紹 - 榮譽資質(zhì) - 新聞資訊 聯(lián)系我們 - 聯(lián)系我們 - 留言反饋 總部-北京凱擎東光電子有限公司 地址:北京市海淀區(qū)知春路豪景大廈B座802室銷售:010-6210 1903/010-8262 3568技術(shù):010-6210 2826傳真:010-6210 1561郵箱:sales@koan-xtal.com分部-上海凱擎電子有限公司 地址:上海市北京東路668號G435室電話:021-53082075傳真:021-53082075郵箱:shzwyou_88@163.com Copy Right By www.dashisuanming.com All Rights Reserved. 版權(quán)歸北京凱擎東光電子有限公司所有 京ICP備12006591號-4 技術(shù)支持:北京網(wǎng)站建設(shè)
第二步: 進(jìn)行篩選
第三步: 進(jìn)入?yún)?shù)選擇,您可以勾選參數(shù),右側(cè)的規(guī)格書以便為您提供參考。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通。 上一篇:QCM晶體介紹[KOAN新產(chǎn)品] 下一篇:晶振溫度特性AT切 相關(guān)新聞 Relevant News 2025春節(jié)放假:1月25日-2月7日 2025-01-15 2024年中秋節(jié)放假通知 2024-09-12 2024春節(jié)放假:2月3日-2月17日 2024-01-31 2023端午節(jié)放假通知 2023-06-21
產(chǎn)品中心
技術(shù)支持
關(guān)于我們
聯(lián)系我們
地址:北京市海淀區(qū)知春路豪景大廈B座802室
銷售:010-6210 1903/010-8262 3568
技術(shù):010-6210 2826
傳真:010-6210 1561
郵箱:sales@koan-xtal.com
地址:上海市北京東路668號G435室
電話:021-53082075
傳真:021-53082075
郵箱:shzwyou_88@163.com



 發(fā)布時間:2020-04-07
發(fā)布時間:2020-04-07  閱讀次數(shù):1949次
閱讀次數(shù):1949次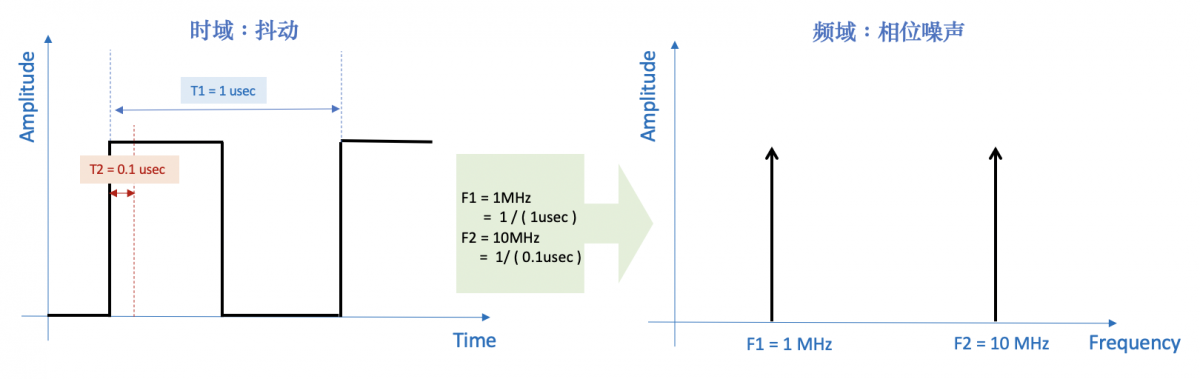 ,fS表示。抖動分為確定性和隨機(jī)性抖動。確定性抖動是可識別的干擾信號造成的,這種抖動的幅度有限。總抖動的構(gòu)成如下:
,fS表示。抖動分為確定性和隨機(jī)性抖動。確定性抖動是可識別的干擾信號造成的,這種抖動的幅度有限。總抖動的構(gòu)成如下: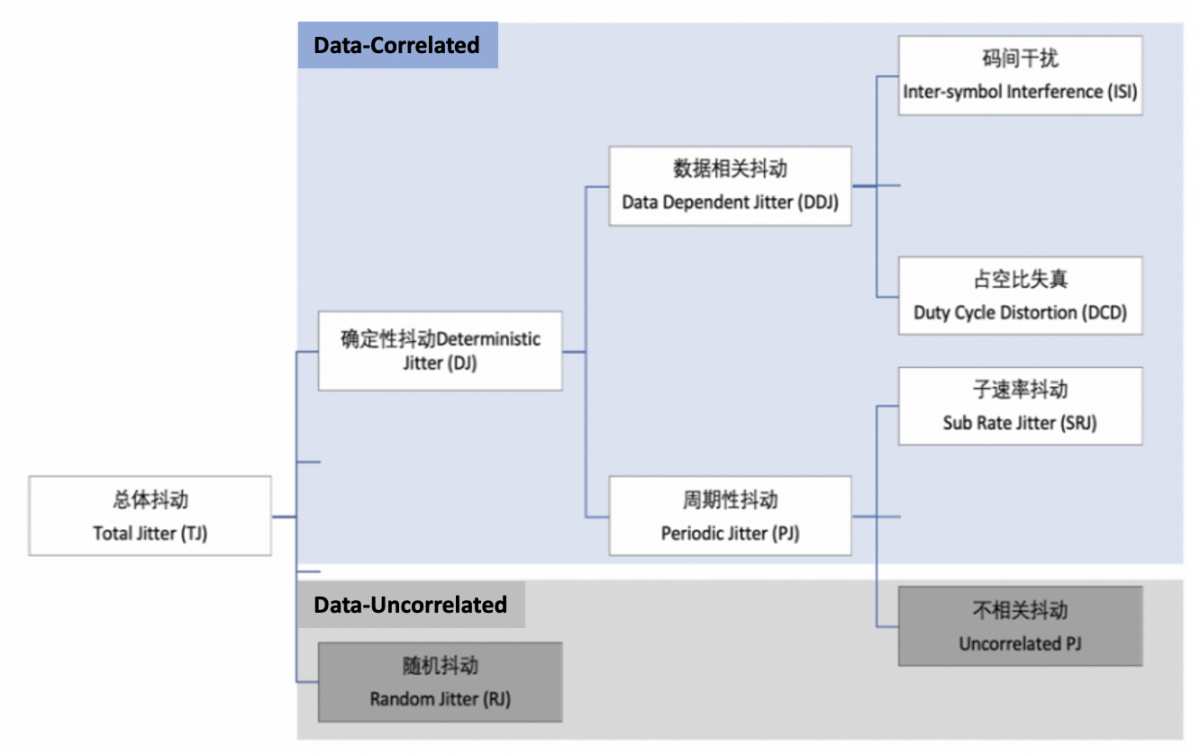 ,噪聲是非周期的函數(shù)。而傅里葉分析可以把此函數(shù)分解成多個正弦周期的函數(shù),如下。
,噪聲是非周期的函數(shù)。而傅里葉分析可以把此函數(shù)分解成多個正弦周期的函數(shù),如下。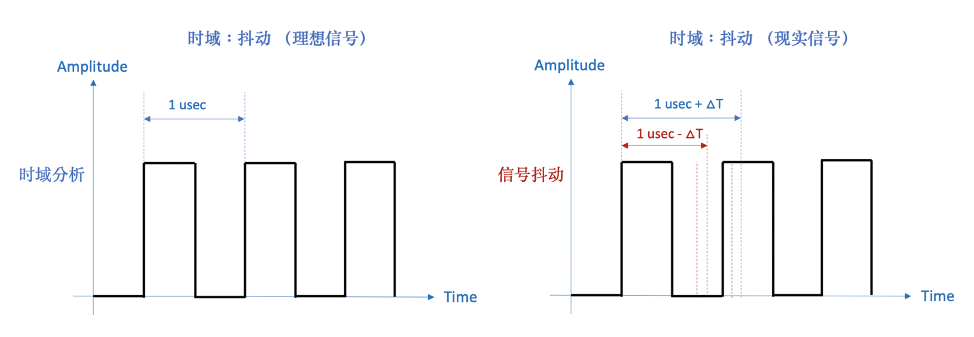 ,功率頻譜就是一條以f0為中心的直線 ,且信號為純正的正弦波。但是任何信號都有不穩(wěn)定性 ,從而產(chǎn)生了邊帶sideband。相位噪聲通常定義為一個振蕩器在某一偏移頻率fm處1Hz寬帶內(nèi)的單邊信號功率和信號的總功率比值,單位是dBc/Hz.通常表示為dBc/Hz@fm。
,功率頻譜就是一條以f0為中心的直線 ,且信號為純正的正弦波。但是任何信號都有不穩(wěn)定性 ,從而產(chǎn)生了邊帶sideband。相位噪聲通常定義為一個振蕩器在某一偏移頻率fm處1Hz寬帶內(nèi)的單邊信號功率和信號的總功率比值,單位是dBc/Hz.通常表示為dBc/Hz@fm。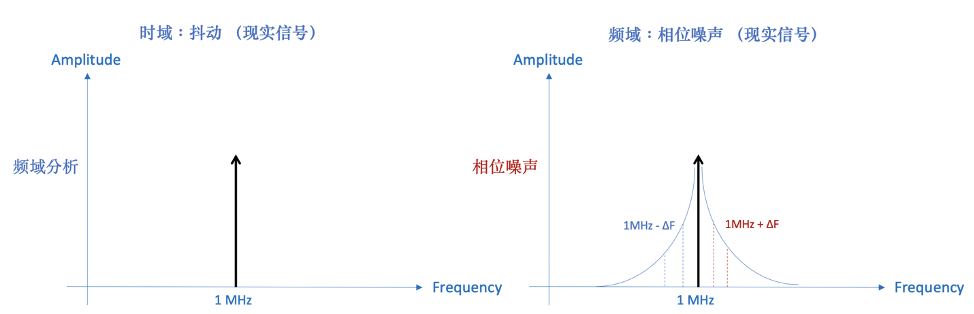 。。
。。 ,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):
,無線電定位,高速目標(biāo)跟蹤和宇航通信等領(lǐng)域十分重要,下面一組圖將說明抖動對系統(tǒng)穩(wěn)定度的影響。。如果時鐘的周期抖動為-1.5ns,那么時鐘的上升沿可能發(fā)生在有效期之前。因此微處理器將顯示不正確的數(shù)據(jù):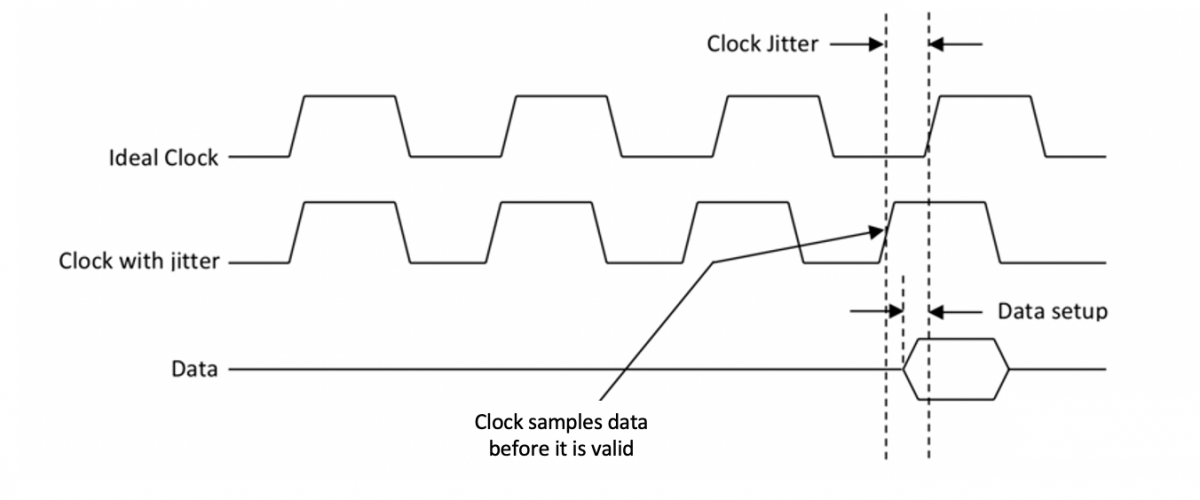 ,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù)
,但是時鐘抖動為±1.5ns,那么數(shù)據(jù)保持時間實際上減少到0.5ns,因此微處理器也將顯示不正確的數(shù)據(jù) 。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。
。計算公式如下。最后的RMS Jitter值與振蕩輸出頻率成反比。 ,右側(cè)的規(guī)格書以便為您提供參考
。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通
。
,右側(cè)的規(guī)格書以便為您提供參考
。復(fù)制生成的產(chǎn)品代號后,您可以和KOAN客服在線溝通
。
 KOAN精益求晶
KOAN精益求晶





